TP Étude cinématique Arceau de Parking
Présentation générale
Le système Priva Park est une évolution d'un arceau de parking manuel, présent sur de nombreux emplacements de parking privatif.

Ce système permet de libérer ou réserver une place de parking à distance par un appui sur un simple bouton, grâce à sa télécommande.
Mise en situation
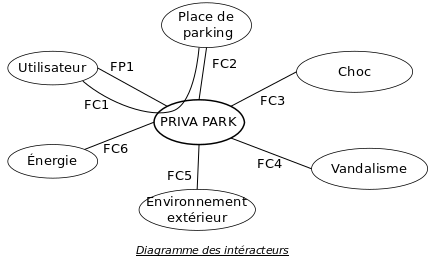
Une analyse fonctionnelle du système permet de dégager les fonctions de service assurées par le système.
Fonction principale :
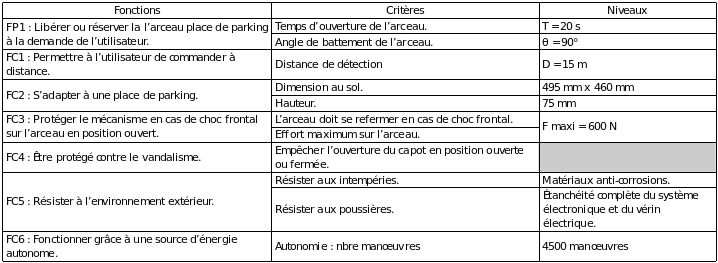
FP1 : Libérer ou réserver la place de parking à la demande de l'utilisateur.
Fonctions contraintes :
FC1 : Permettre à l'utilisateur de commander à distance.
FC2 : S'adapter à une place de parking.
FC3 : Protéger le mécanisme en cas de choc frontal sur l'arceau en position ouvert.
FC4 : Être protégé contre le vandalisme.
FC5 : Résister à l'environnement extérieur.
FC6 : Fonctionner grâce à une source d'énergie autonome.
Extrait du Cahier des Charges Fonctionnel
Analyse structurelle de l'arceau
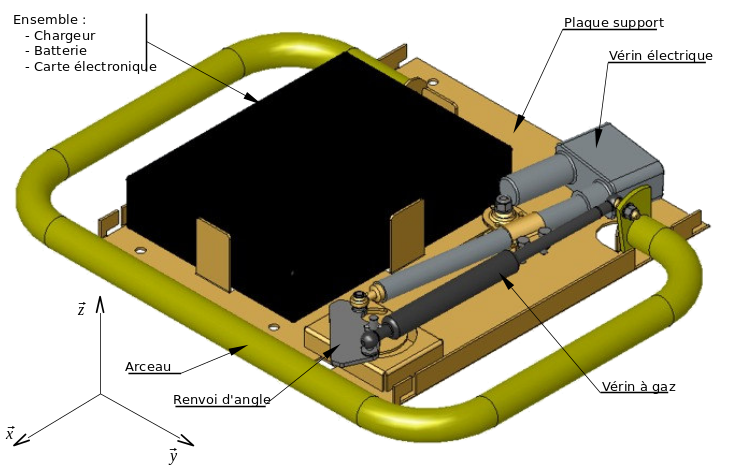
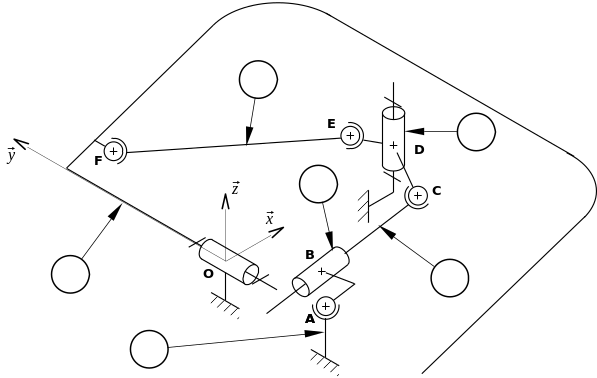
L'image ci-dessous donne une vue en perspective du mécanisme capot retiré.
Les performances cinématiques du système définies au travers du cahier des charges fonctionnelle sont directement liées au choix des caractéristiques de l'actionneur électrique. Après validation de la solution technique adoptée pour assurer les fonctions de service, il faut donc procéder au choix du vérin.
Une étude cinématique va permettre de faire un premier choix qui sera affiné par la suite au travers d'une étude dynamique du système.
Problématique
« Comment déterminer les caractéristiques cinématiques de l'actionneur électrique permettant de respecter les données cinématiques du cahier des charges fonctionnelles ? »
Étude cinématique
Paramétrage et modélisation
Une modélisation du système a conduit à inventorier les ensembles cinématiques suivants :
EC0 : l'ensemble des pièces fixes associées au bâti,
EC1 : l'ensemble des pièces solidaires de l'arceau,
EC2 : l'ensemble des pièces solidaires du vérin à gaz
EC3 : l'ensemble des pièces solidaires du renvoi d'angle,
EC4 : l'ensemble des pièces solidaires de la tige du vérin électrique,
EC5 : l'ensemble des pièces solidaires du corps du vérin électrique.
Remarque : Sur ce modèle cinématique, le vérin à gaz est assimilé à une simple barre ne possédant pas de mouvement relatif entre le corps et la tige.
Une modélisation du mécanisme est donné sur le schéma cinématique ci-dessous :
Méthode : Question 1
A partir du de la vue en perspective du mécanisme et de sa décomposition, compléter sur le document réponse le schéma cinématique en repérant les différents ensembles cinématiques.
Méthode : Question 2
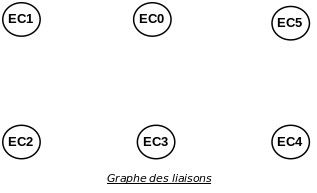
A partir du schéma cinématique donné, construire sur le document réponse le graphe des liaisons correspondant.
Étude préliminaire
D'après le Cahier des charges, l 'arceau doit se déployer avec une rotation de 90° en 20 secondes.
Méthode : Question 3
Déterminer la fréquence de rotation (en tr/min) de l'arceau dans ces conditions.
Simulation Méca3D
L'étude cinématique sera réalisée à l'aide de MECA3D. Il s'agit d'un module complémentaire intégré à SOLIDWORKS permettant de simuler le comportement mécanique d'un mécanisme à partir de sa maquette numérique.
Dans notre étude, nous allons ici réaliser une étude cinématique.
Méthode : A faire
Démarrer le diaporama : TP MECA3D Arceau PRIVA PARK.odp [odp]
Observation de la simulation
Répondre sur le document réponse.
Méthode : Question 4
A partir des observations de la simulation, Indiquer la nature des mouvements suivants :
Mvt(1/0) : ...
Mvt(4/5) : ...
Mvt(3/0) : ...
Mvt(4/0) : ...
Mvt(5/0) : ...
Méthode : Question 5 :
Peut-on parler d'un mouvement plan général pour le mouvement du vérin à gaz (EC2) par rapport au support (EC0) ? Justifier votre réponse.
Exploitation des résultats
Reprendre la suite du diaporama (Diapo 17).
Méthode : Question 6
Déterminer la course du vérin électrique permettant d'obtenir la rotation de l'arceau de 90°.
Méthode : Question 7
A partir de la simulation réalisée, déterminer la vitesse de sortie de la tige du vérin électrique.
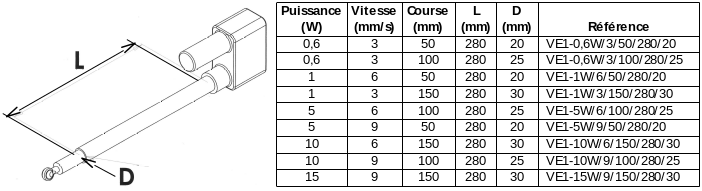
Une étude mécanique sur le mécanisme a permis de montrer que la puissance utile fournie par le vérin ne dépassait pas Pmax = 1 W.
Un extrait du catalogue constructeur correspondant au vérin utilisé est présenté ci-dessous :
Méthode : Question 9
A partir des caractéristiques utiles pour le choix du vérin électrique, surligner dans le tableau du document réponse la référence de l'actionneur qui convient ici à notre système ainsi que ses caractéristiques techniques.
Méthode : Question 9
Avec le vérin choisi, reprendre la simulation en tenant compte des caractéristiques de ce vérin et déterminer le temps de manœuvre de l'arceau.
Temps de manœuvre de l'arceau Tm = ... secondes
Évaluation des écarts
Il existe un écart entre le temps de manœuvre annoncé par le constructeur et celui obtenu par la simulation.
Méthode : Question 10
Expliquer pourquoi il existe donc un écart entre ces deux valeurs.
Méthode : Question 11
Quelles seraient les solutions qui permettraient de réduire cet écart ?