Vecteur position
Il nous faut être en mesure, à tout instant, de définir la position de n'importe quel point du solide dans l'espace. A cette fin, on utilise un vecteur position.
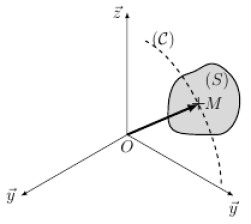
Soit \((S)\) un solide en mouvement par rapport à un repère \(\mathcal{R}_0(\vec{x}_0, \vec{y}_0, \vec{z}_0)\).
Soit \(M\) un point appartenant au solide \((S)\) de coordonnées \(x(t),y(t),z(t)\) à l'instant \(t\).
Au cours de ce mouvement, le point M décrit dans le repère \(\mathcal{R}_0\) une courbe \((\mathcal{C})\) appelée trajectoire du point \(M(t)\) dans le repère .
Le vecteur position du point \(M(t)\) du solide \((S)\), dans le repère \(\mathcal{R}_0\) , à l'instant \(t\), est le vecteur \(\overrightarrow{OM(t)}\) où \(O\) est l'origine du repère \(\mathcal{R}_0\).